Competition Overview
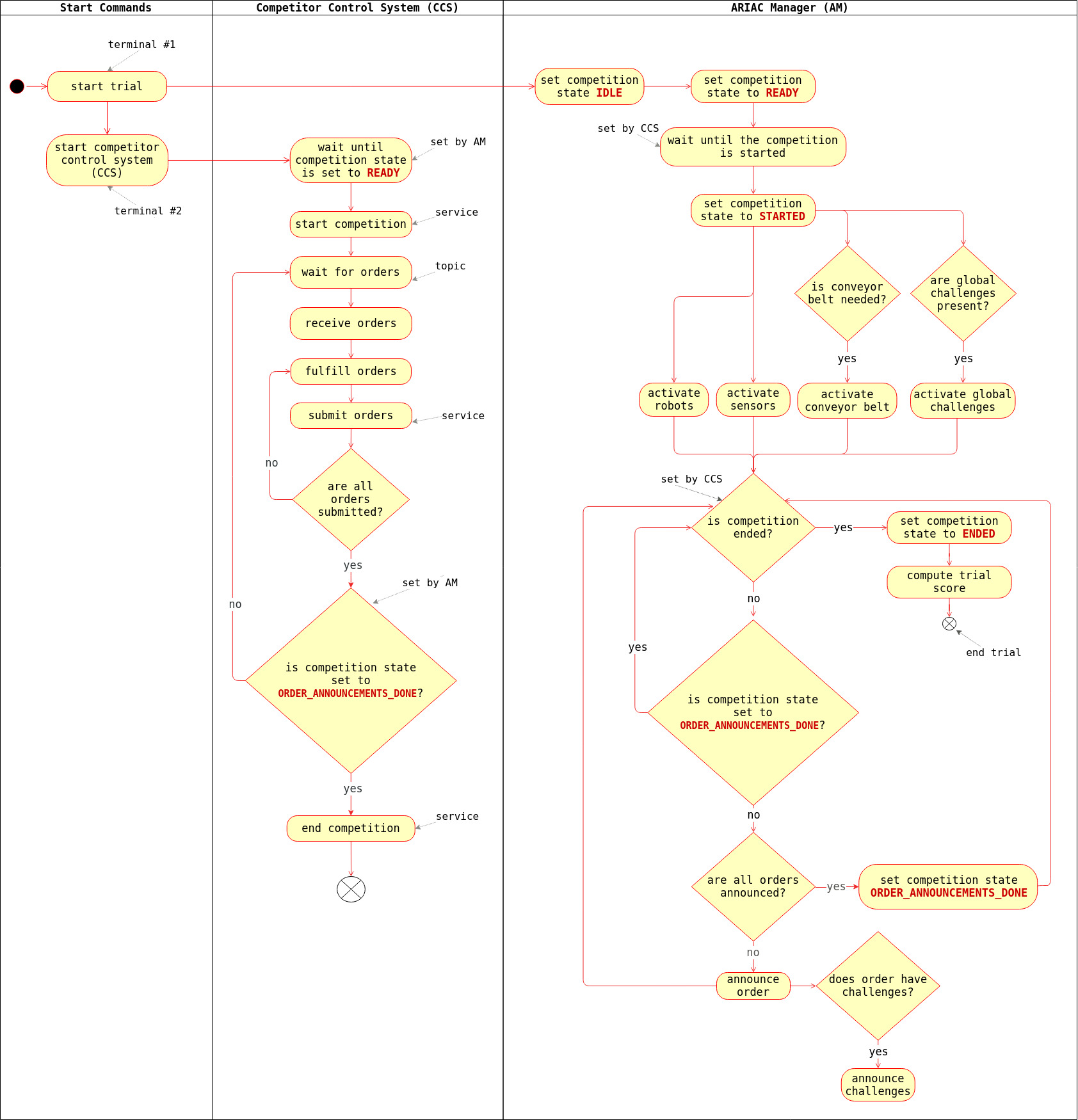
Fig. 1 Flowchart showing the interactions between the Competitor Control System (CCS) and the ARIAC Manager (AM).
Fig. 1 provides an overview of the competition.
The competition consists of two main actors, the CCS and the AM.
The competition is set to different states while it is running and the CCS needs to subscribe to the topic /ariac/competition_state to properly implement the programming logic.
Start-Up Commands
To compete in ARIAC, competitors have to issue two commands in two different terminals.
Terminal 1: Competitors start the trial with the following command:
ros2 launch ariac_gazebo ariac.launch.py trial_name:={name_of_trial} competitor_pkg:={package_name} sensor_config:={name_of_sensor_config}This command starts the Gazebo simulation environment and the AM, the latter handles the communications between the CCS and the ARIAC software.
Terminal 2: Competitor start their CCS:
ros2 launch {ccs_package_name} {ccs_launch_file_name}This command should start any nodes the CCS needs to run, including MoveIt.
Program Flow
The first task of the CCS is to start the competition with the service /ariac/start_competition. Although the simulation environment is running, the competition is not started at this point.
The state of the competition must be READY before this service can be called. The call to this service starts the robot controllers, activates all sensors, starts the conveyor belt (if used in the trial), and starts the global challenges (if used in the trial). The result of the call will set the state of the competition to STARTED. Orders will then be announced on the topic /ariac/orders.
Once orders are announced, the CCS fulfills and submits orders. Order announcements can be time based, part placement based, or order submission based. More information on these conditions can be found in Conditions. Agility challenges can also be announced with these conditions. More information on agility challenges can be found in Agility Challenges. To submit orders, the CCS needs to call the service /ariac/submit_order which uses the ID of the order as an argument.
Once all orders have been submitted, the CCS calls the service /ariac/end_competition. The result of the call will set the state of the competition to ENDED. The CCS can then exit. The AM will then compute the scoring for the current trial (see Scoring section), end the trial, and save the results. Before calling the service to end the competition, the CCS needs to ensure that all orders have been announced. The state of the competition is set to ORDER_ANNOUNCEMENTS_DONE when all orders from the trial have been announced.