steppyngstounes.parsimoniousStepper¶
Classes
- class steppyngstounes.parsimoniousStepper.ParsimoniousStepper(start, stop, N, minStep=0.0, inclusive=False, scale='dl', minsteps=4, maxinitial=11)¶
Bases:
StepperNon-monotonic stepper that samples sparsely explored regions
Computes the function where the curvature is highest and where not many points have been computed.
Note
By its nature, this
Steppermust record.- Parameters:
start (float) – Beginning of range to step over.
stop (float) – Finish of range to step over.
N (int) – Number of points to sample.
minStep (float) –
Smallest step to allow (default (stop - start) * eps).
inclusive (bool) – Whether to include an evaluation at start (default False)
scale (str) – Parameter to indicate whether to scale by value “dy” or arc length “dl” (default “dl”).
minsteps (int) – Minimum number of steps to take (default 4).
maxinitial (int) – The maximum number of even steps to take before adapting (default 11).
Examples
>>> import numpy as np >>> from steppyngstounes import ParsimoniousStepper
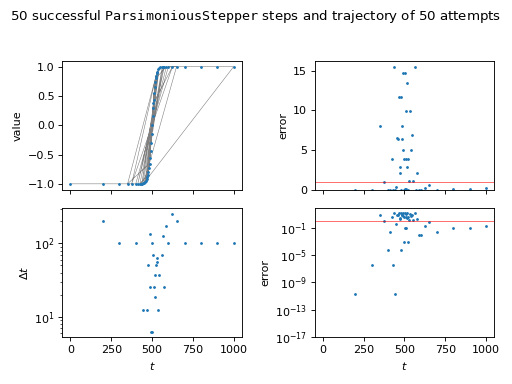
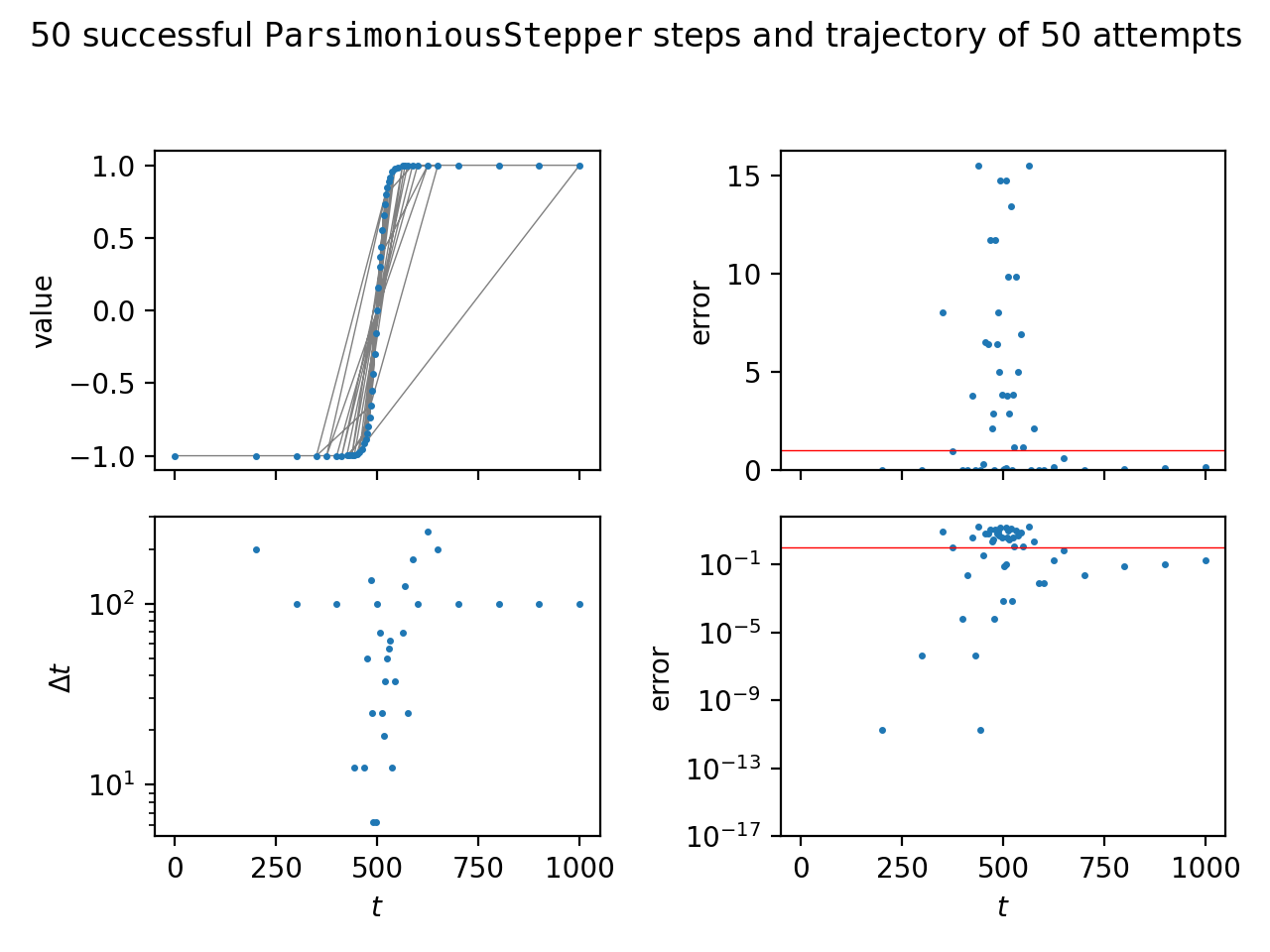
We’ll demonstrate using an artificial function that changes abruptly, but smoothly, with time,
\[\tanh\frac{\frac{t}{t_\mathrm{max}} - \frac{1}{2}} {2 w}\]where \(t\) is the elapsed time, \(t_\mathrm{max}\) is total time desired, and \(w\) is a measure of the step width.
>>> totaltime = 1000. >>> width = 0.01
The scaled “error” will be a measure of how much the solution has changed since the last step, | new - old | / errorscale).
>>> errorscale = 1e-2
Iterate over the stepper from start to stop (inclusive of calculating a value at start).
>>> stepper = ParsimoniousStepper(start=0., stop=totaltime, inclusive=True, ... N=50) >>> for step in stepper: ... new = np.tanh((step.end / totaltime - 0.5) / (2 * width)) ... ... _ = step.succeeded(value=new)
>>> s = "{} succesful steps in {} attempts" >>> print(s.format(stepper.successes.sum(), ... len(stepper.steps))) 50 succesful steps in 50 attempts
>>> steps = stepper.steps[stepper.successes] >>> ix = steps.argsort() >>> values = stepper.values[stepper.successes][ix] >>> errors = abs(values[1:] - values[:-1]) / errorscale
As this stepper doesn’t use the error, we don’t expect the post hoc error to satisfy the tolerance.
(
Source code,png,hires.png,pdf)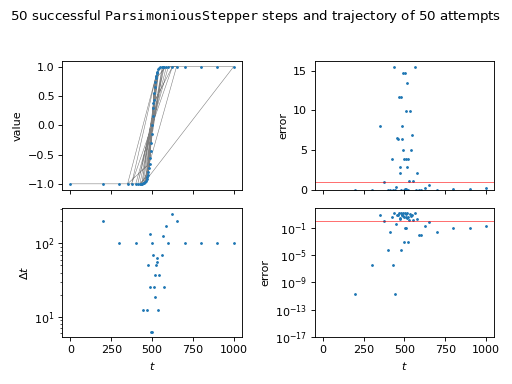
- property errors¶
ndarray of the “error” at each step attempt.
The user-determined “error” scalar value (positive and normalized to 1) at each step attempt is passed to
Stepperviasucceeded().
- next()¶
Return the next step.
Note
Legacy Python 2.7 support.
- Return type:
- Raises:
StopIteration – If there are no further steps to take
- property sizes¶
ndarray of the step size at each step attempt.
- property steps¶
ndarray of values of the control variable attempted so far.
- succeeded(step, value=None, error=None)¶
Test if step was successful.
Stores data about the last step.
- Parameters:
step (
Step) – The step to test.value (float, optional) – User-determined scalar value that characterizes the last step. Whether this parameter is required depends on which
Stepperis being used. (default None).error (float, optional) – User-determined error (positive and normalized to 1) from the last step. Whether this parameter is required depends on which
Stepperis being used. (default None).
- Returns:
Whether step was successful.
- Return type:
bool
- property successes¶
ndarray of whether the step was successful at each step attempt.
- property values¶
ndarray of the “value” at each step attempt.
The user-determined scalar value at each step attempt is passed to
Stepperviasucceeded().
{kind=link}
{kind=link}