Hedgehog graph abstraction. More...
#include "graph.h"
Public Member Functions | |
| Graph (std::string const &name="Graph", std::unique_ptr< Scheduler > scheduler=std::make_unique< DefaultScheduler >()) | |
| Default graph constructor, construct a graph with the name "Graph" and with a default scheduler. | |
| ~Graph () override=default | |
| Default graph destructor. | |
| template<tool::CompatibleInputNode< typename core::GIM< Separator, AllTypes... >::inputs_t > InputNode_t> | |
| void | inputs (std::shared_ptr< InputNode_t > inputNode) |
| Set an input node and connect the node to the graph's inputs for all common types. | |
| template<class InputDataType , tool::CompatibleInputNodeForAType< InputDataType, typename core::GIM< Separator, AllTypes... >::inputs_t > InputNode_t> | |
| void | input (std::shared_ptr< InputNode_t > inputNode) |
| Set an input node and connect the node to the graph's input InputDataType. | |
| template<tool::CompatibleOutputNode< typename core::GOM< Separator, AllTypes... >::outputs_t > OutputNode_t> | |
| void | outputs (std::shared_ptr< OutputNode_t > outputNode) |
| Set an output node and connect the node to the graph's outputs for all common types. | |
| template<class OutputType , tool::CompatibleOutputNodeForAType< OutputType, typename core::GOM< Separator, AllTypes... >::outputs_t > OutputNode_t> | |
| void | output (std::shared_ptr< OutputNode_t > outputNode) |
| Set an output node and connect the node to the graph's output OutputDataType. | |
| template<tool::SenderNode SenderNode_t, tool::ReceiverNode ReceiverNode_t> | |
| void | edges (std::shared_ptr< SenderNode_t > sender, std::shared_ptr< ReceiverNode_t > receiver) |
| Create an edge between two nodes for all common types. | |
| template<class CommonType , tool::SenderNodeForAType< CommonType > SenderNode_t, tool::ReceiverNodeForAType< CommonType > ReceiverNode_t> | |
| void | edge (std::shared_ptr< SenderNode_t > sender, std::shared_ptr< ReceiverNode_t > receiver) |
| Create an edge between two nodes for a specific type. | |
| void | executeGraph (bool waitForInitialization=false) |
| Execute the graph. | |
| void | finishPushingData () |
| Indicate to the graph that no more input data are pushed to the graph. | |
| template<tool::MatchInputTypeConcept< tool::Inputs< Separator, AllTypes... > > CompatibleInputType_t> | |
| void | pushData (std::shared_ptr< CompatibleInputType_t > data) |
| Push data into the graph. | |
| void | waitForTermination () |
| Wait for the graph to terminate. | |
| auto | getBlockingResult () |
| Get result data from the graph. | |
| void | createDotFile (std::filesystem::path const &dotFilePath, ColorScheme colorScheme=ColorScheme::NONE, StructureOptions structureOptions=StructureOptions::NONE, DebugOptions debugOption=DebugOptions::NONE, std::unique_ptr< ColorPicker > colorPicker=std::make_unique< JetColor >(), bool verbose=false) |
| Create a dot file representing a snapshot of the state of the graph at the moment of the call, the graph is saved into the file dotFilePath. | |
| void | deviceId (int deviceId) |
| Set the device id (GPU ID) for all the nodes in a graph. | |
| void | cleanGraph () |
| Clean the graph. | |
 Public Member Functions inherited from hh::behavior::Node Public Member Functions inherited from hh::behavior::Node | |
| Node (std::shared_ptr< hh::core::abstraction::NodeAbstraction > core) | |
| Constructor's node. | |
| virtual | ~Node ()=default |
| Default destructor. | |
| std::shared_ptr< hh::core::abstraction::NodeAbstraction > const & | core () const |
| Core accessor. | |
| std::string | name () const |
| Node's name accessor. | |
Private Attributes | |
| std::shared_ptr< core::CoreGraph< Separator, AllTypes... > > const | coreGraph_ = nullptr |
| Core of the graph. | |
| std::unique_ptr< std::set< std::shared_ptr< Node > > > | nodes_ = nullptr |
| Set of nodes given by the end user. | |
Detailed Description
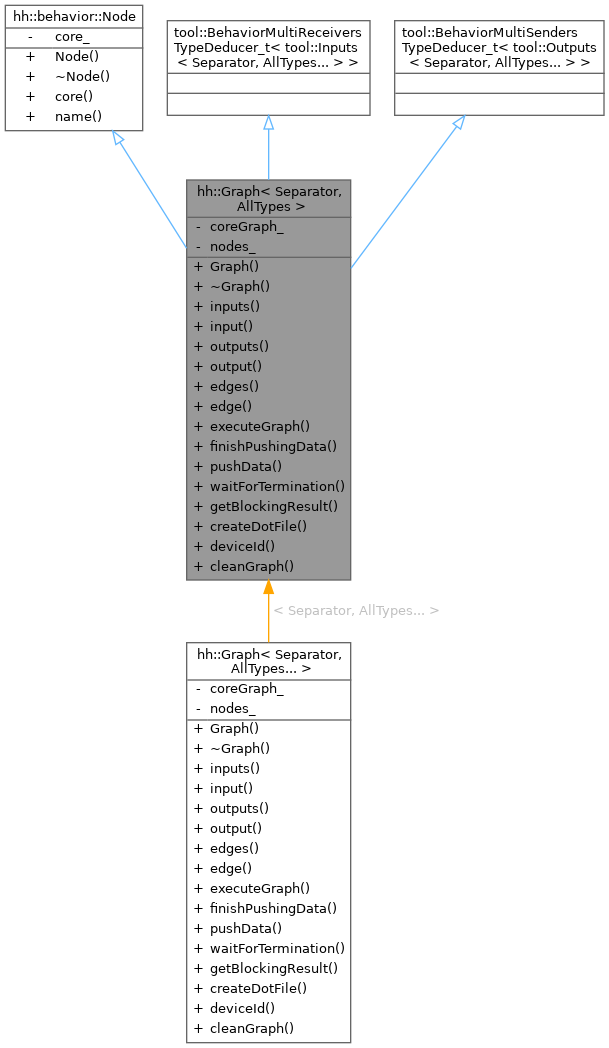
class hh::Graph< Separator, AllTypes >
Hedgehog graph abstraction.
The graph in the Hedgehog library allows the user to create a dataflow. The graph regroups a set of nodes representing parts of the computation. The most important nodes are the tasks (for heavy computation), the state managers (to manage the local state of the computation) and the graph themselves (nested computation).
If a node is set as input of the graph (Graph::input / Graph::inputs), the data sent to the graph are transmitted to the input nodes. The output nodes (set with Graph::output / Graph::outputs) produce the output data of the graph. Between the input and the output nodes, the nodes need to be connected via edges(Graph::edge / Graph::edges).
A graph can be duplicated with ah hh::AbstractExecutionPipeline. Useful for mapping data across multiple devices (such as GPUs).
The difference between the singular and plural method (Graph::input / Graph::inputs, Graph::output / Graph::outputs, Graph::edge / Graph::edges) is/are the type[s] used for the connection: if it is plural the connection is made for all possible types, if it is singular the connection is only made for the user specified type.
The sequence of operations to use a graph are:
- Instantiate a graph [See example]
- Populate the graph [See example]
- Run the graph (Graph::executeGraph)
- Push data into the graph (Graph::pushData)
- Indicate that no more data will be pushed (Graph::finishPushingData)
- Gather output data with Graph::getBlockingResult can be put in a while loop, the function returns nullptr when the graph is terminated (with Graph::finishPushingData) and all data have been processed.
- Wait for the graph to fully terminate (Graph::waitForTermination) The default scheduling method for a graph is to launch all the node's threads and let the OS manages the threads.// Instantiate a graph and its nodesauto g = std::make_shared<hh::Graph<3, int, float, double, int, float, double>>();auto innerInputInt = std::make_shared<IntFloatDoubleTask>();auto innerTaskFloat = std::make_shared<IntFloatDoubleTask>();auto innerOutput = std::make_shared<IntFloatDoubleTask>();auto innerSM = std::make_shared<hh::StateManager<1, int, int>>(std::make_shared<IntState>());auto innerGraph = std::make_shared<IntFloatDoubleGraph>();// Create a graphg->input<int>(innerInputInt);g->input<float>(innerTaskFloat);g->inputs(innerSM);g->inputs(innerGraph);g->edges(innerInputInt, innerOutput);g->edges(innerSM, innerOutput);g->edges(innerTaskFloat, innerOutput);g->outputs(innerOutput);g->outputs(innerGraph);g->executeGraph(); // Execute the graph// Push different types of datafor (int i = 0; i < 2000; ++i) {g->pushData(std::make_shared<int>(i));g->pushData(std::make_shared<float>(i));g->pushData(std::make_shared<double>(i));}// Indicate that no other data will be pushed (trigger termination of the graph)g->finishPushingData();// Get the output datawhile (auto variant = g->getBlockingResult()) {std::visit(hh::ResultVisitor{[](std::shared_ptr<int> &val) { /*Do something with an int*/ },[](std::shared_ptr<float> &val) { /*Do something else with a float*/ },[](std::shared_ptr<double> &val) { /*Do something else again with a double*/ }}, *variant);}// Wait for the graph to terminateg->waitForTermination();Visitor used to explore Hedgehog graph variant result.Definition: result_visitor.h:27
- Attention
- The conformity rules are: 1) for the input nodes, the node and the graph should share at least one input type, 2) for the output nodes, the node and the graph should share at least one output type and 3) between two nodes an edge can only be drawn for [a] common type[s].
- If the process wants to push a certain amount of data / get the output and start with new input data, the Graph::pushData and Graph::getBlockingResult can be alternated without the while loop because the graph won't terminate. This technique can only be used if the number of output can be deduced in advance by the end user. Once all processing is complete, then the user must indicate they are done with Graph::finishPushingData, otherwise the graph will deadlock and never terminate. The Graph::cleanGraph method can be used to "clean" the graph nodes, and reset the user nodes attributes between computations.
- Template Parameters
-
Separator Separator position between input types and output types AllTypes List of input and output types
Constructor & Destructor Documentation
◆ Graph()
|
inlineexplicit |
Default graph constructor, construct a graph with the name "Graph" and with a default scheduler.
- Parameters
-
name Name of the graph to construct scheduler Scheduler used by the graph (should inherit from hh::Scheduler)
- Exceptions
-
std::runtime_error if the core is not valid, should derives from CoreGraph
Definition at line 156 of file graph.h.

◆ ~Graph()
|
overridedefault |
Default graph destructor.
Member Function Documentation
◆ cleanGraph()
◆ createDotFile()
|
inline |
Create a dot file representing a snapshot of the state of the graph at the moment of the call, the graph is saved into the file dotFilePath.
- Parameters
-
dotFilePath Path where the file is stored. colorScheme Color scheme used to color the tasks, either to show difference in execution or in waiting times, or nothing. The chosen color depends on the colorPicker. structureOptions Show how the graph is represented, with or without input queue size, with or without all task groups. debugOption Add debug information on the dot graph. colorPicker Color scheme used to generate the dotfile, JetColor by default. verbose Enable verbose mode: report when dot files are created or overwritten to standard out, default false.
Definition at line 324 of file graph.h.


◆ deviceId()
◆ edge()
|
inline |
Create an edge between two nodes for a specific type.
Validate the sender and receiver node and if valid, create an edge for the CommonType type
- Template Parameters
-
SenderNode_t Type of the sender node ReceiverNode_t Type of the receiver node
- Parameters
-
sender Sender node receiver Receiver node
◆ edges()
|
inline |
Create an edge between two nodes for all common types.
Validate the sender and receiver node and if valid, create an edge for all common types between the sender output types and the receiver input types
- Template Parameters
-
SenderNode_t Type of the sender node ReceiverNode_t Type of the receiver node
- Parameters
-
sender Sender node receiver Receiver node
◆ executeGraph()
◆ finishPushingData()
◆ getBlockingResult()
|
inline |
Get result data from the graph.
Get result from the graph while blocking the main thread. The results are presented under the form of
If the output type is known in advance one can use
If multiple types are possible the following code can be used:
- Returns
- A result of the graph
◆ input()
|
inline |
Set an input node and connect the node to the graph's input InputDataType.
Check if the input node is a valid object, and then connect it to the graph input for the InputDataType type.
- Template Parameters
-
InputDataType Input type used for the connection between the node and the graph InputNode_t Type of the input node
- Parameters
-
inputNode Input node to connect
◆ inputs()
|
inline |
Set an input node and connect the node to the graph's inputs for all common types.
Check if the input node is a valid object, and then connect it to the graph for all common types.
- Template Parameters
-
InputNode_t Type of the input node
- Parameters
-
inputNode Input node to connect
◆ output()
|
inline |
Set an output node and connect the node to the graph's output OutputDataType.
Check if the output node is a valid object, and then connect it to the graph output for the OutputDataType type.
- Template Parameters
-
OutputDataType Output type used for the connection between the node and the graph OutputNode_t Type of the output node
- Parameters
-
outputNode Output node to connect
◆ outputs()
|
inline |
Set an output node and connect the node to the graph's outputs for all common types.
Check if the output node is a valid object, and then connect it to the graph output for all common types.
- Template Parameters
-
OutputNode_t Type of the output node
- Parameters
-
outputNode Output node to connect
◆ pushData()
|
inline |
◆ waitForTermination()
Member Data Documentation
◆ coreGraph_
|
private |
