Sensors
Competitors can place sensors anywghere in the environment. Sensors have no collision so they can overlap if necessary. Each sensor has a cost that factors into the final score.
Sensor Costs
Sensor Type |
Cost |
|---|---|
|
$100 |
|
$100 |
|
$200 |
|
$300 |
|
$300 |
|
$500 |
|
$500 |
|
$2000 |
Sensor Types
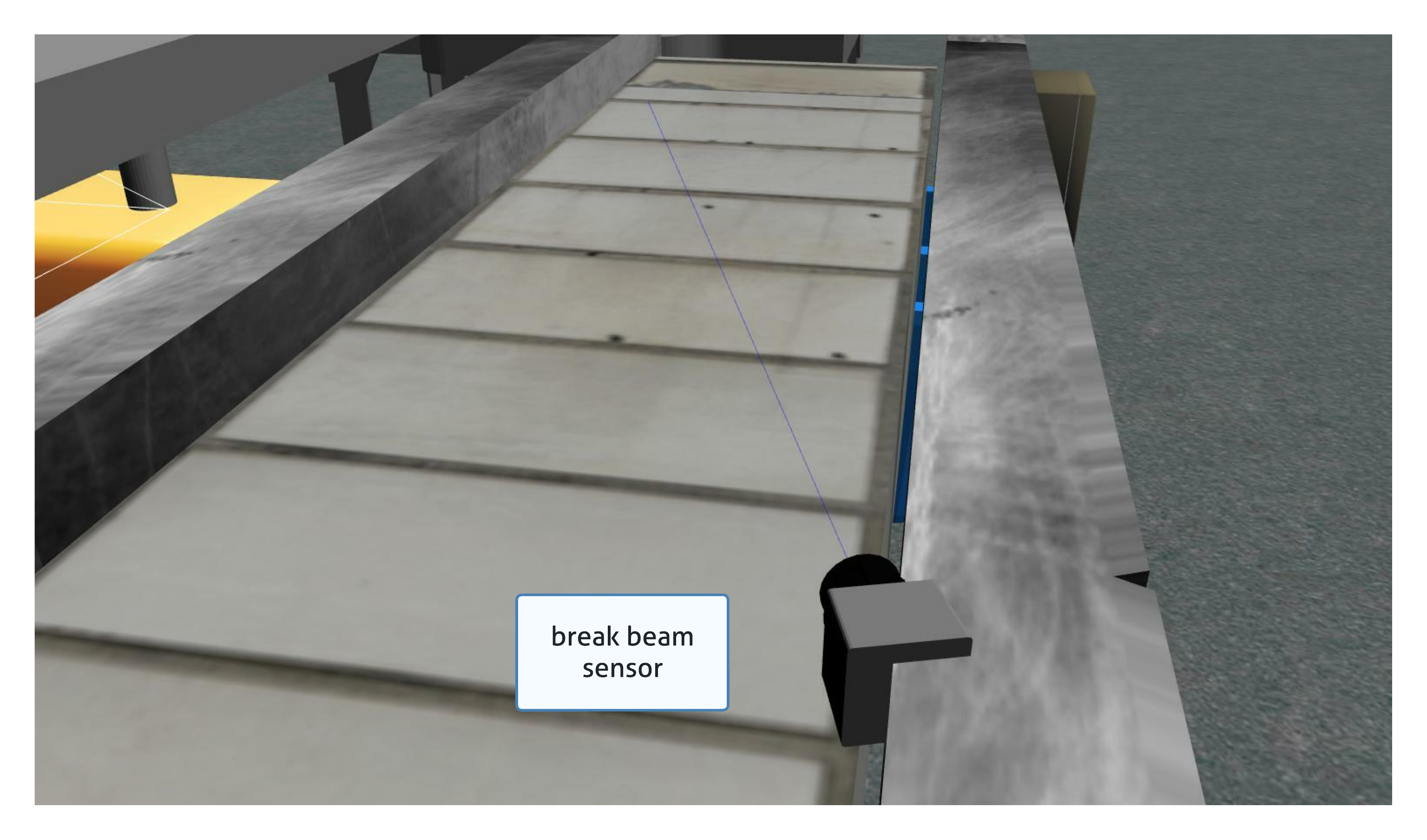
Break Beam
The break beam sensor reports when a beam is broken by an object. It does not provide distance information.
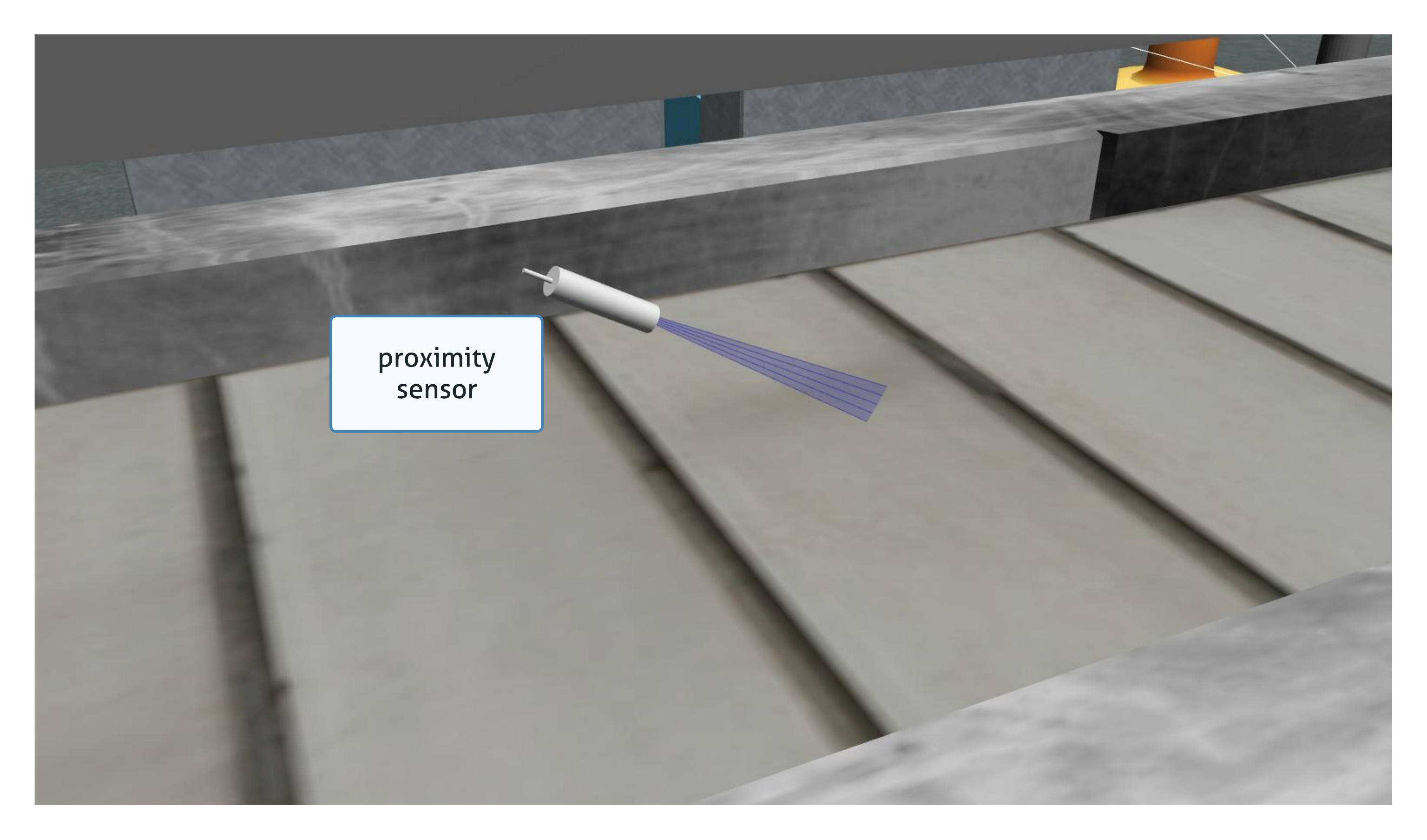
Proximity
The proximity sensor outputs how far an object is from the sensor.
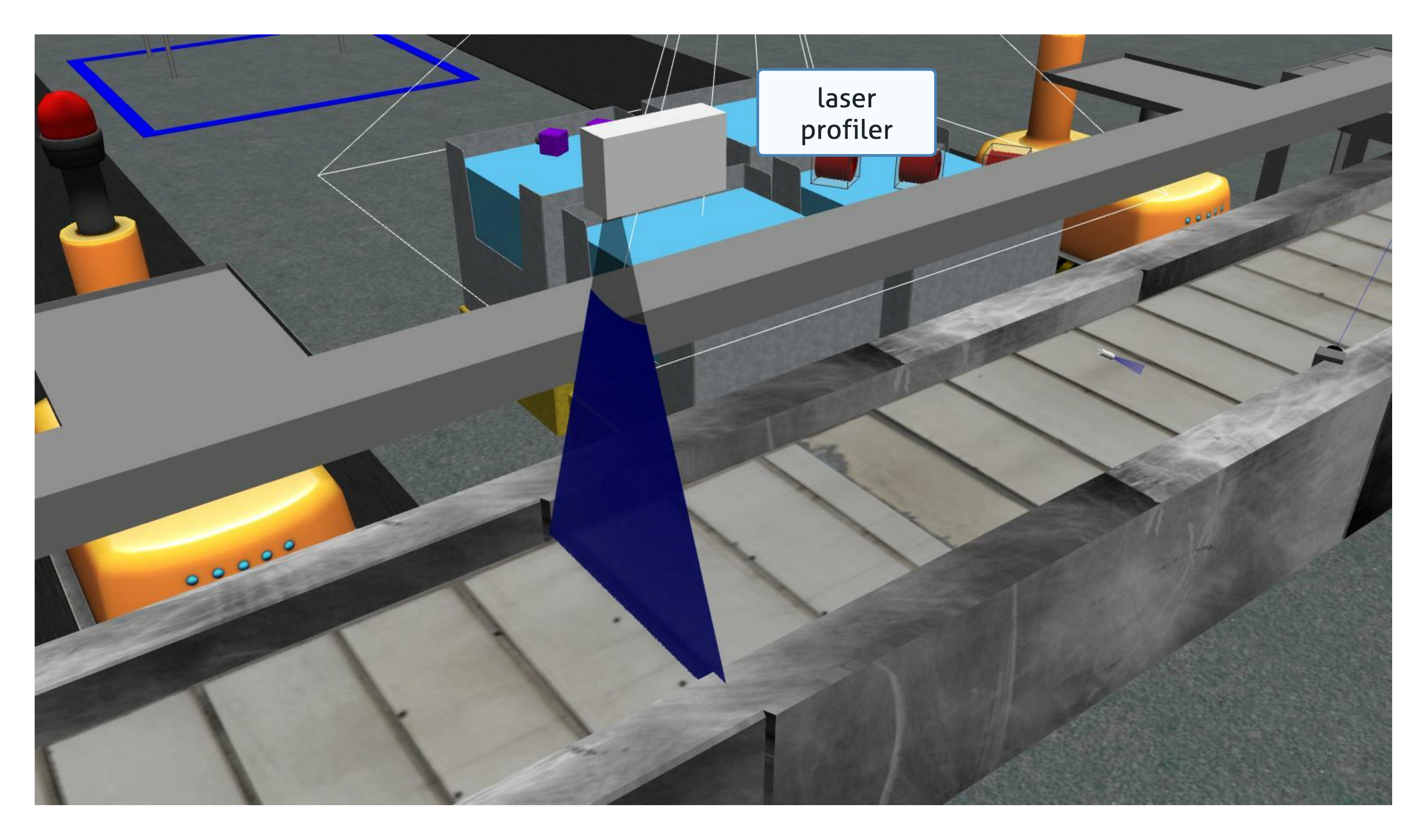
Laser Profiler
The laser profiler provides an array of distances to a sensed object.
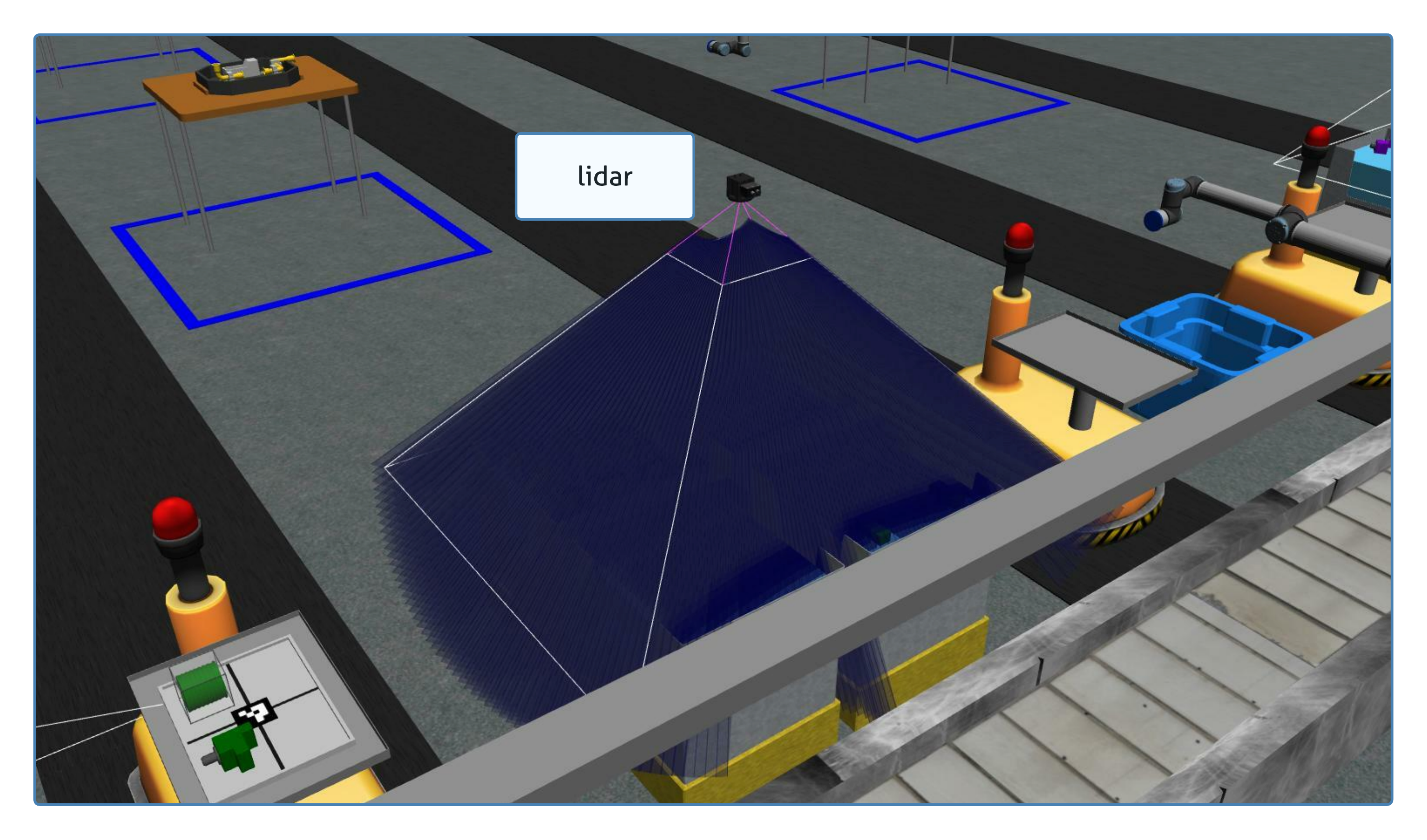
Lidar
The LIDAR sensor provides a point cloud of detected objects.
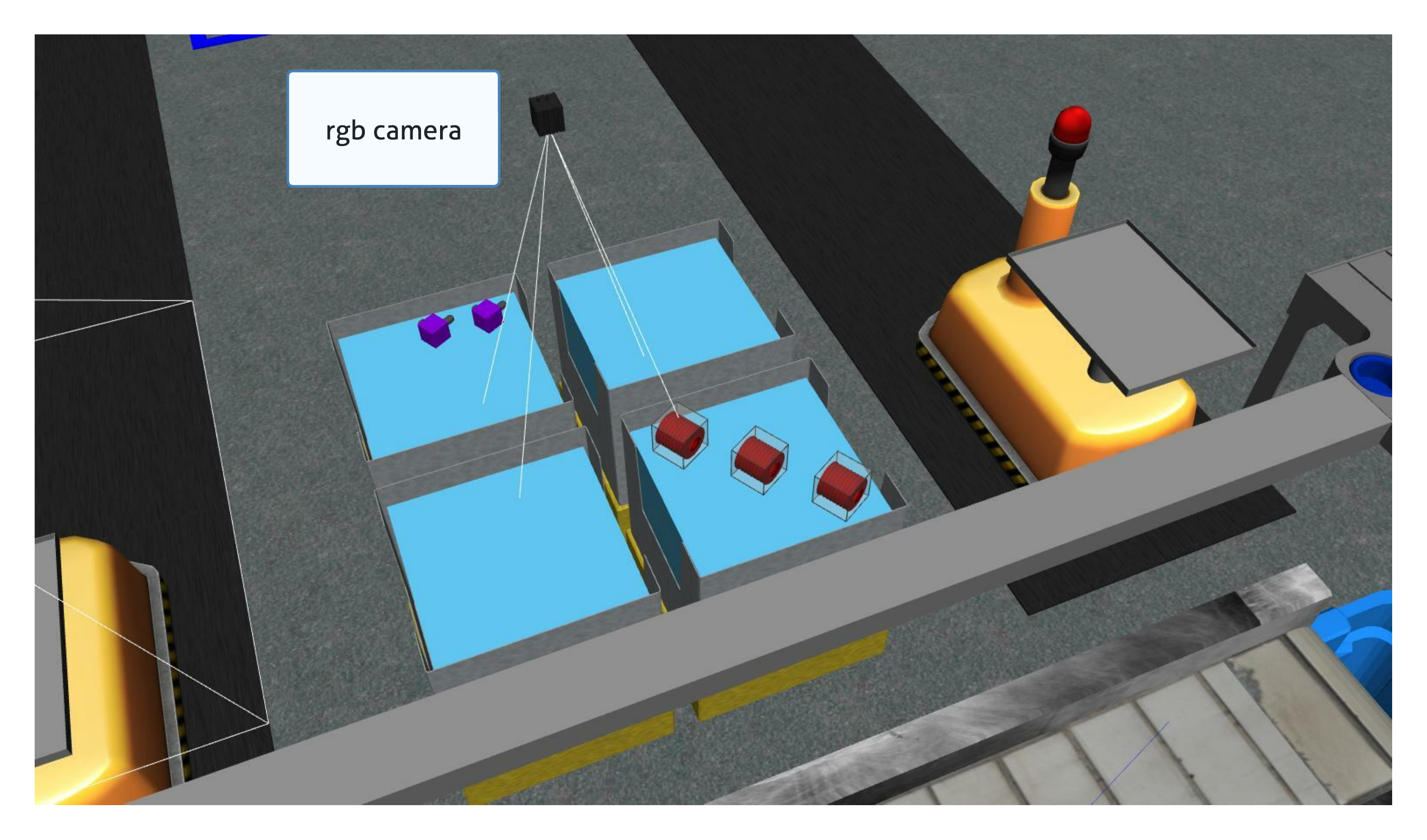
RGB Camera
The RGBD camera provides an RGB image.
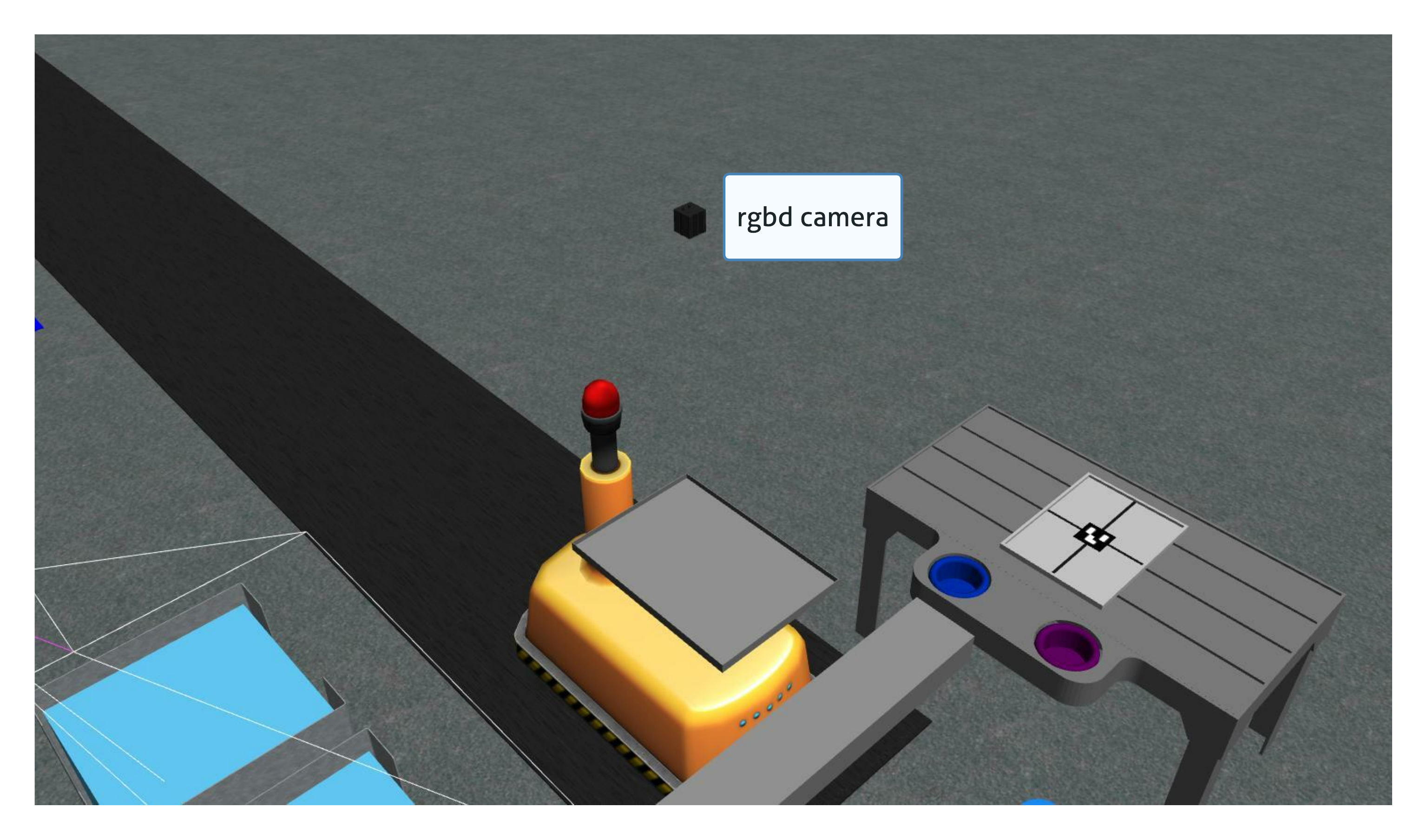
RGBD Camera
The RGBD camera provides an RGB image and a depth image.
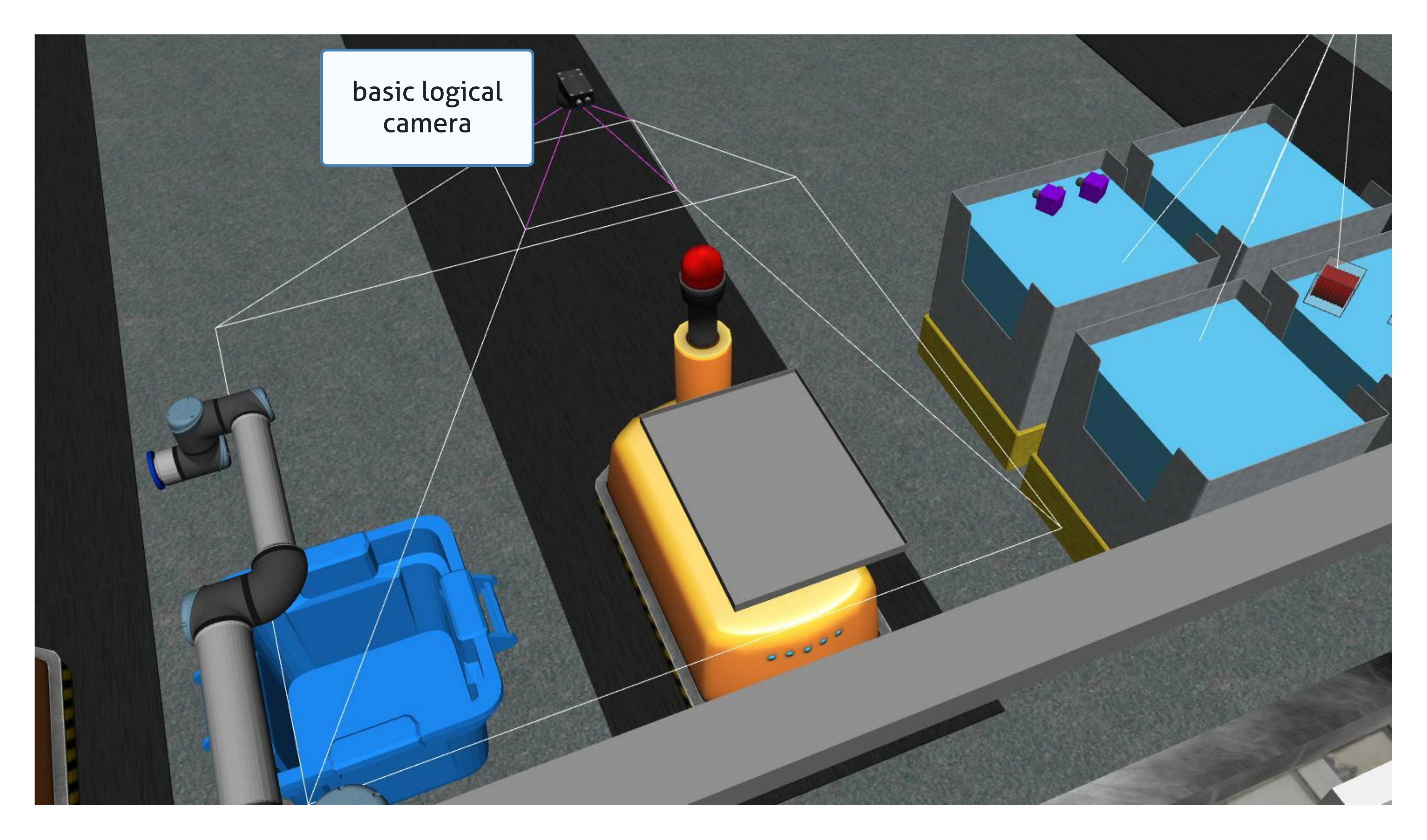
Basic Logical Camera
The basic logical camera provides a list of kit tray poses and a list of part poses. The type and the color of an object are not reported by this sensor.
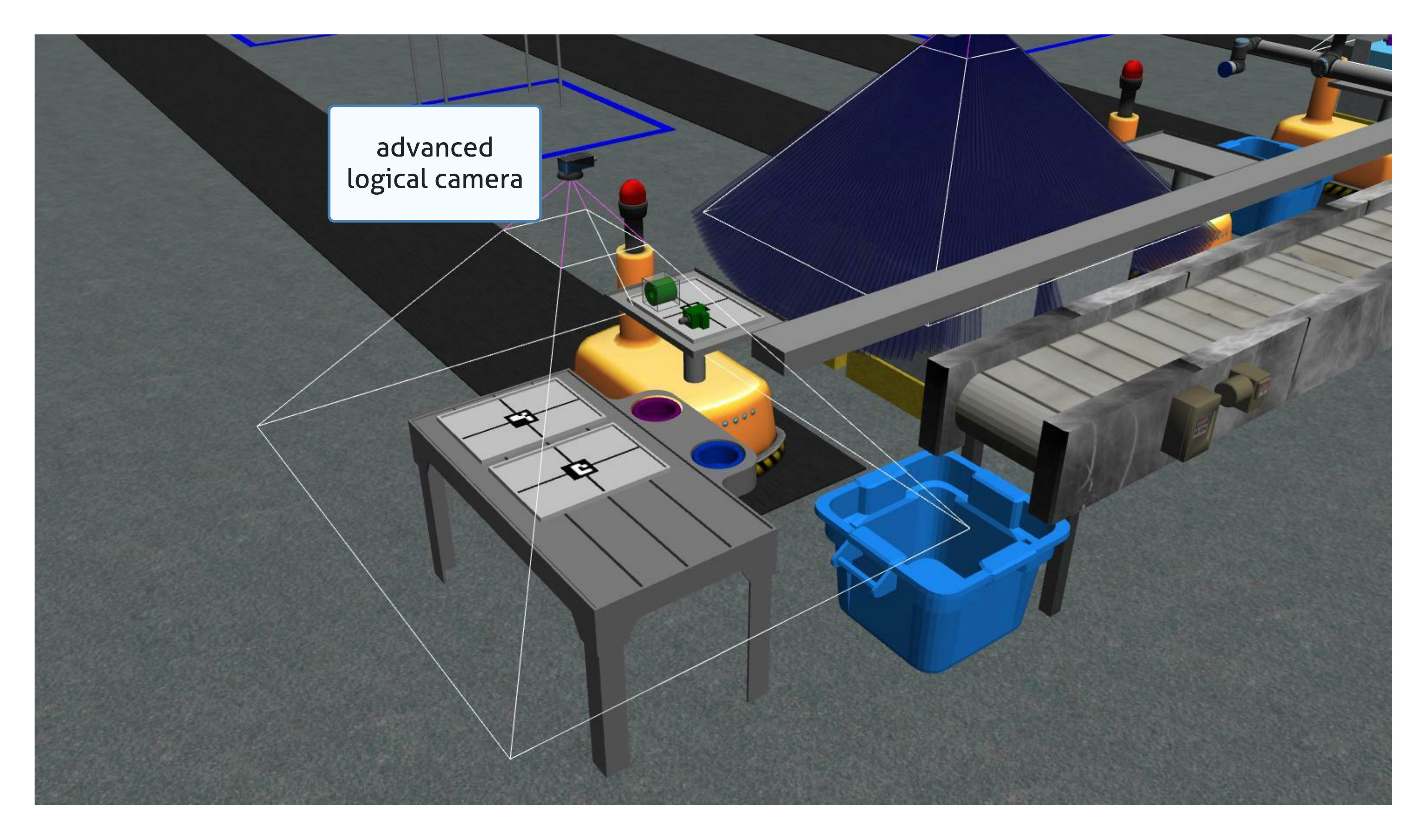
Advanced Logical Camera
The advanced logical camera reports the pose, the type, and the color of a detected object.
Sensor Configuration File
Sensors are configured using a YAML file. See the Configuration Files page for more information on how to configure the competition environment with sensors.